Model
eRob170HXXI
Strain wave gear-ratio
40-50
40-80
40-100
40-120
40-160
Peak torque for start and stop(Nm)
402
519
568
617
647
Permissible max.value at average load torque(Nm)
196
284
372
451
451
Rated torque(Nm)
137
206
265
294
294
Permissible maximum momentary torque(Nm)
686
980
1080
1180
1180
Max. output rotational speed(RPM)
40
25
20
16.7
12.5
Motor power(W)
1000
Power Input Voltage(V)
48V (±10%)
Please make sure to read "Comparison of Switching Power Supply and ePower" and the “eRob Rotary Actuator User Manual” Chapter 3, for clear instructions on powering the eRob module.
Strain wave gear output inertia(g-mm2)
6679752
Strain wave gear output mass(KG)
2.02
Outer diameter*length
170*144.9mm
Strain wave gear input inertia(g-mm2)
1517148
Strain wave gear input mass(KG)
1.66
Weight(KG)
9.29
Common parameters
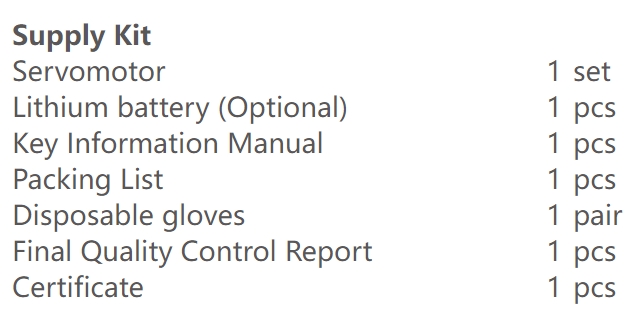
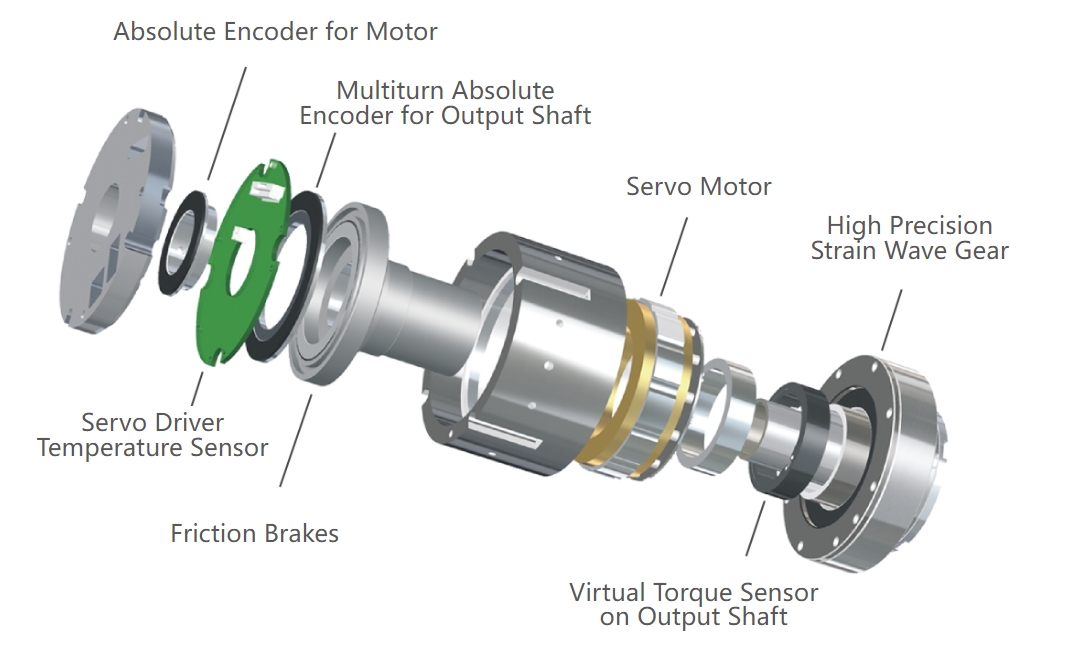
ID: 18mm, IP grating:IP54*, Brake model: friction brake
Optional device
Communication type: EtherCAT / CANopen/Modbus, Output encoder resolution: 19Bit. Repeatability/Accuracy: ±7/±15 arc seconds or ±10/±25 arc second.
EtherCAT version rotary actuator
Optional interface: RS485, Pulse/DIR, I/O, ±10V Analog and STO.
CANopen version rotary actuator
Optional interface: RS485, Pulse/DIR, I/O, ±10V Analog and STO.